It runs on generators or civic electricity, mainly used for underwater activities at a maximum depth of 30 meters, secondary development, and specialized services.
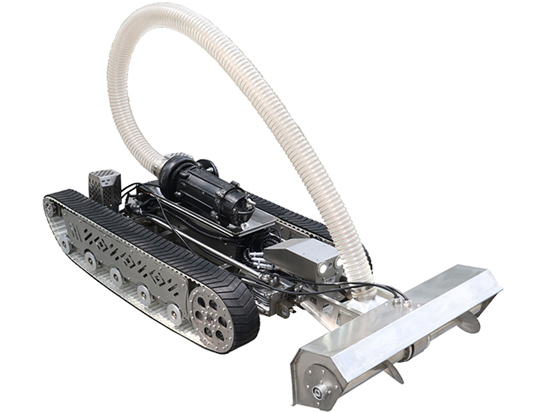
We also build custom product applications, such as robots for underwater cleaning, sucking, etc. 1. The underwater cleaning robot was used to remove the silt of rivers or water tanks.
2.Dredging and underwater excavation using wringing and suction robots.
3. Harvesting aquatic products: primarily utilized to gather aquatic crops such as horseshoe, fungus, and lotus root
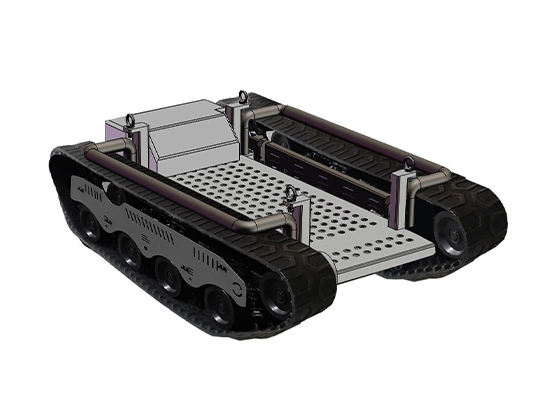
Features 1. The Matilda system has an excellent shock absorption effect, is well suited to rough ground, and can relieve the pressure effect of the steps. There are fewer wearing components and more reliability since the two wheels share the steering wheel. 2. The frame body is welded with one single sheet metal plate, lightweight, sturdy, and completely sprayed to prevent rust. 3. The components used for waterproof power transfer are filled with oil, durable, and resistant to 30 meters of depth in water. 4. Standard rubber track for industry, long-lasting, and simple to replace. 5. The pulleys are made of high-molecular material (more than 5 million molecular weights), which has excellent strength and water resistance and significant overall weight loss. 6. The easy-to-use model architecture makes it easy to change and upgrade. 7. It can use a battery, generator, or civil power as a power supply. 8. 2 control modes available: 1) standard control box + a portable remote controller 2) Visual control box mode: Supports 4 wired video signals and 13 PWM steering gear control signals, with the capability to customize and develop additional underwater equipment."
Can be equipped with water pump, high-pressure water gun, siphon pump,shovel etc. Support secondary development and application customization.
Maintenance for the sealing system : Observe the sealing condition of the oil bag and maintain and fill oil regularly prolonging the service life of the underwater chassis. Maintenance for the lubrication system : The engine oil can be replaced, protecting the bearing and reducer,and extending
Parameter
Item
Data
Item
Data
Dimension
1500*1170*660mm
Speed
2.5-4KM/h
Self Weight
230kg
Designed Load
300-700kg
Waterproof
IP68
Rated Torque
300-1200NM
Track Width
230mm
Reducer Efficiency
65-85%
Gear Ratio
1:10-1:40
Suspension System
Matilda
Motor
(1.5-4KW)*2
Climbing Ability
≤30°(can climb stairs)
Motor Rated Speed
1500r/min
Maximum Span
220mm
Cable Control Distance
Standard 50m, maximum 150m
Ground clearance
200mm
Maximum Underwater Depth
30m
Power Supply
Generator or civil electricity
Track grounding length
670mm
Obstacle crossing ability
235mm
Characteristics
Control characteristics
way to control
Speed control (PV), position control (PP), IP, CSP, CSV, CST
Support motor
Waterproof AC torque motor
Vehicle control accuracy
±0.1m
Speed control accuracy
±0.05m/s
Communication Interface
RS-485
Standard ModBus protocol
CanOpen
Standard CanOpen protocol, CiA301/402
EtherCAT
no
Encoder type
Encoder port
2500P/R
Ambient temperature
-20℃—50℃, use derating when it is higher than 40℃
Altitude
30 meters underwater, derating for use above 1000m